Hvad er robotter?
En mangfoldig forståelse
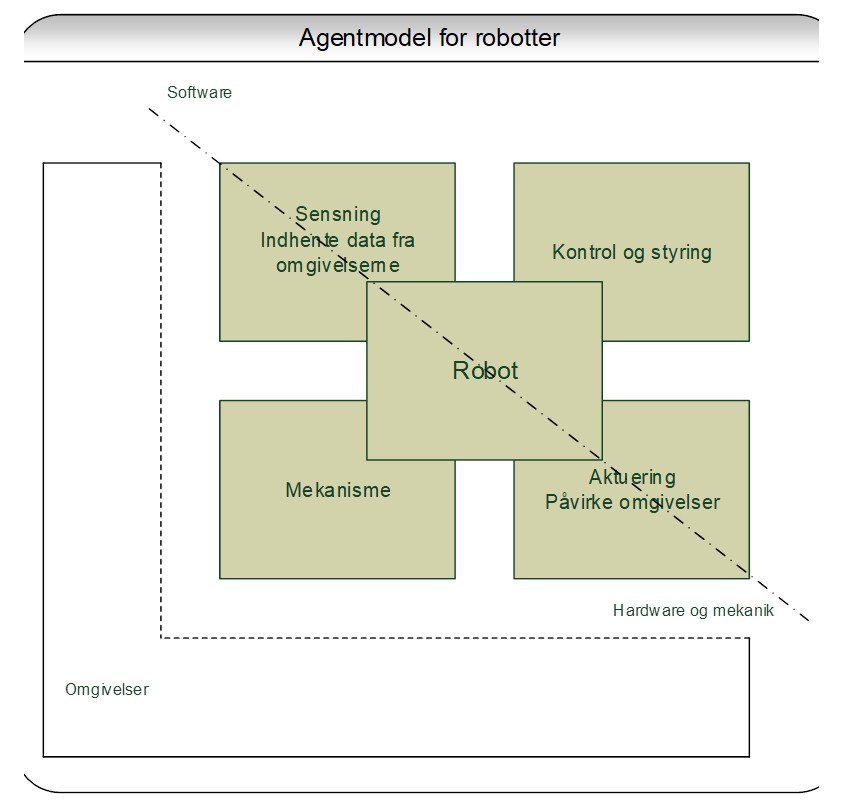
En robot kan beskrives som en autonom fysisk interaktiv agent, som opfatter sine omgivelser igennem sensorer, hvorefter den fortolker disse input og reagerer ved hjælp af effektorer.
Ordet robot stammer fra det tjekkiske ord robota, som betyder noget i retning af slave – en maskine som arbejder for mennesker.
Der er en række forskellige definitioner og beskrivelser af hvad en robot er – alt afhængig af om man arbejder med robotter industrielt, socialt eller til undervisning.
Fortolkning af input fra sensorer foregår typisk i en mikro-controller som processerer algoritmen, altså den mere eller mindre intelligente kunstige intelligens, som robotten besidder.
Ofte vil robotter kunne udføre opgaver autonomt og uden fjernstyring. Flere forskere inden for kunstig intelligens og robotter taler om vigtigheden af samspillet mellem krop og hjerne i en form for kropsliggørelse af intelligensen.
Robotter benævnes i øvrigt ofte som agenter.
Historisk kan man udpege tre faser (eller paradigmer):
- Fase – Robotter fra mytologi og science fiction
Robotter fra mytologien og science fiction har en særlig fascinationskraft, som kan gøre brug af robotter i forbindelse med undervisning motiverende i sig selv. - Fase – Industrirobotten
Industrirobotten indtog scenen i 1961 med Unimaten. Industrirobotterne afspillede i denne fase traditionelt et forud fastlagt program. Denne type robotter forholdt sig ikke til sine omgivelser, hverken hvordan de så ud, eller hvad der konkret foregik. Denne type robotter fungerer i såkaldt strukturerede og statiske omgivelser. - Fase – Den situerede og kropslige robot
Den situerede og kropsligt intelligente robot gjorde sit indtog i slutningen af 1980’erne. Brooks forskede i situerede robotter og introducerede dette nye paradigme som den første. Denne type robot forholder sig dynamisk til de aktuelle omgivelser og fungerer i ustrukturerede omgivelser, hvor f.eks. tingenes placering ændrer sig over tid. Denne type robot opfatter ved hjælp af sensorer en del af det, der foregår i omgivelser. Robotten forholder sig på den måde dynamisk til tid og rum. At robotten bliver situeret, gør, at den kan programmeres til at fungere i de samme omgivelser som mennesker og med sikkerhed for, at robotten f.eks. ikke skader mennesker eller omgivelser i øvrigt. Pfeifer og andre har siden udfoldet begrebet om kropslig intelligens.
Robot-centreret model
Teknologier i R O B O læring
Projektet anvender teknologier, der på forskellig vis egner sig for de 3 skoletyper:
- til afprøvning i folkeskolen
- studieforberedende på gymnasiet
- praksis- og brancherettet på erhvervsskolen
| MICRO:BITS
Platformen er en microcontroller (computer i en chip), der er grundstenen i det meste af teknologien. Med tilføjelse af sensorer og aktuatorer kan den også bruges til at bygge robotter. En aktuator er en type af motor til at bevæge eller styre en mekanisme eller et system. Leveres aktuelt af Danmarks Radio under navnet ultra:bit til samtlige 4. klasser i Danmark. | 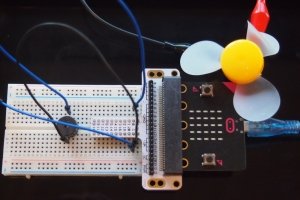 |
| DASH & DOTS
Dash and Dot are robots that can sense, act and think. Students use block coding on different iPad apps to control their robots. Maker materials can be added such as lego, tape, cardboard, to transform the robots. There are educational accessories to Dash and dots to support art, music and engineering. | 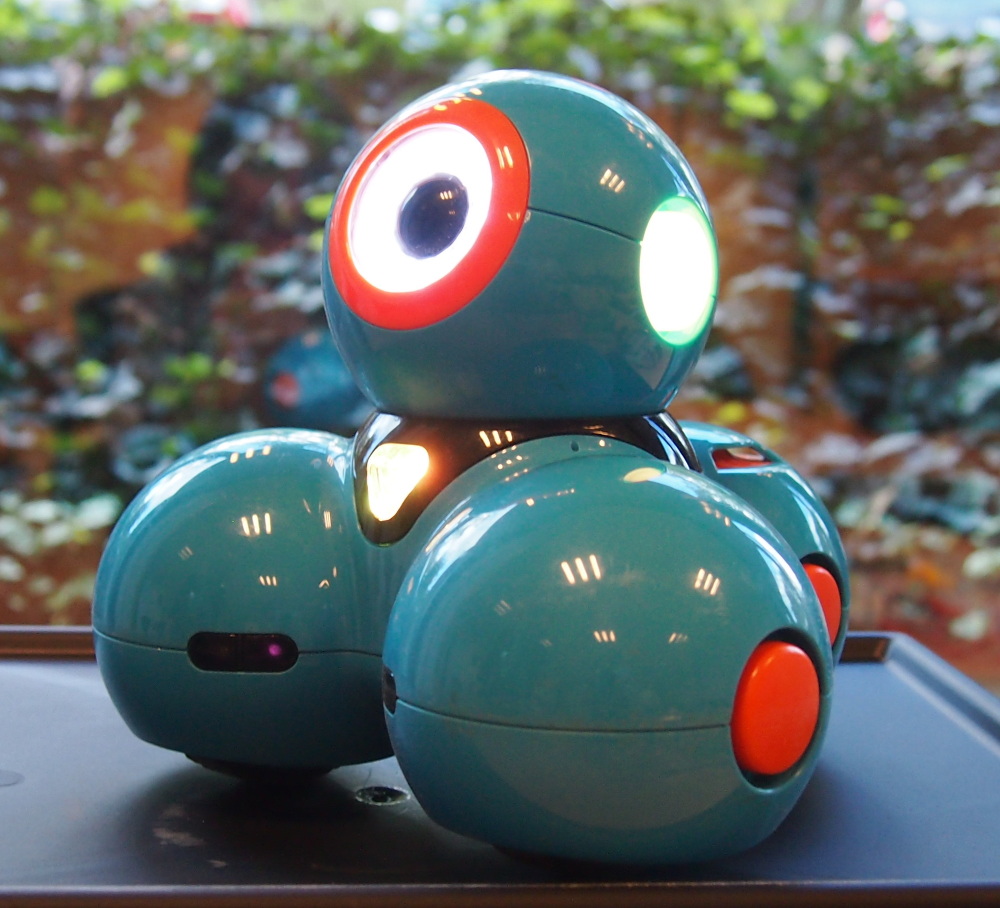 |
| OZOBOTS
Med 2.5 x 2.5 x 2.5 cm en af de mindste robotter i verden, som kan programmeres. Velegnet til børn, som hurtigt kan tegne baner og lade den køre rundt på papir eller direkte på iPad eller smartphone. |  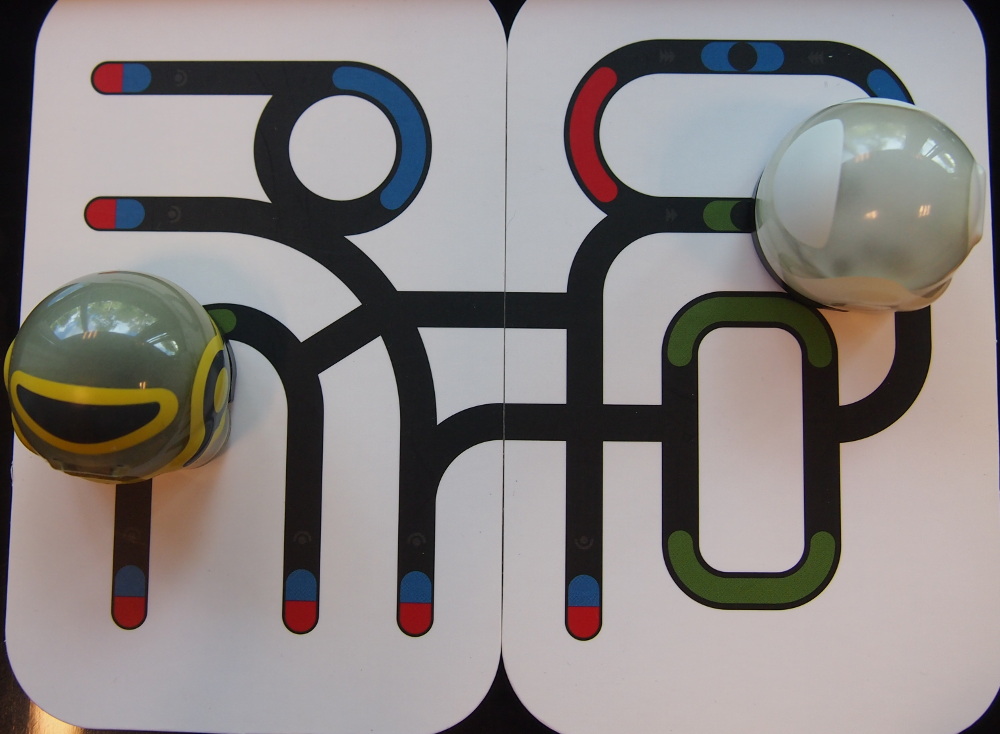 |
| LEGO MINDSTORM og ARDUINO
Bruges også på Teknologiskolen, Odense. | 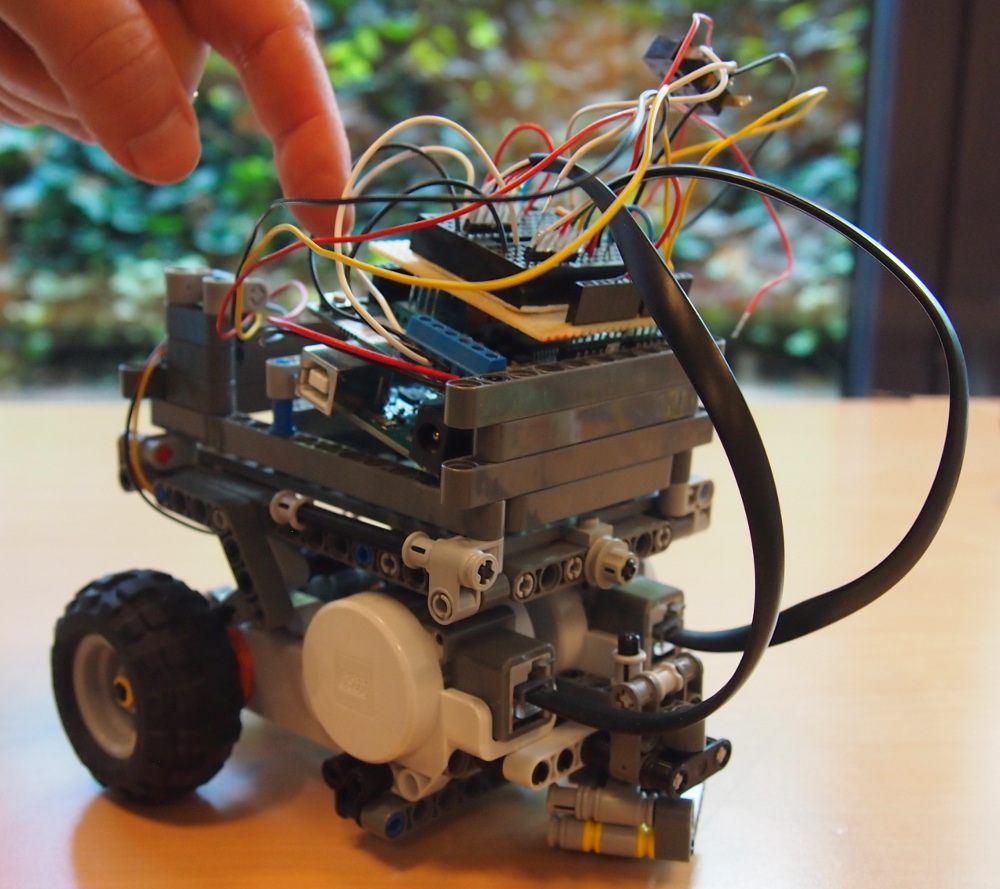 |
| CIRCUIT PLAYGROUND EXPRESS
Med indbyggede sensorer og LED. | 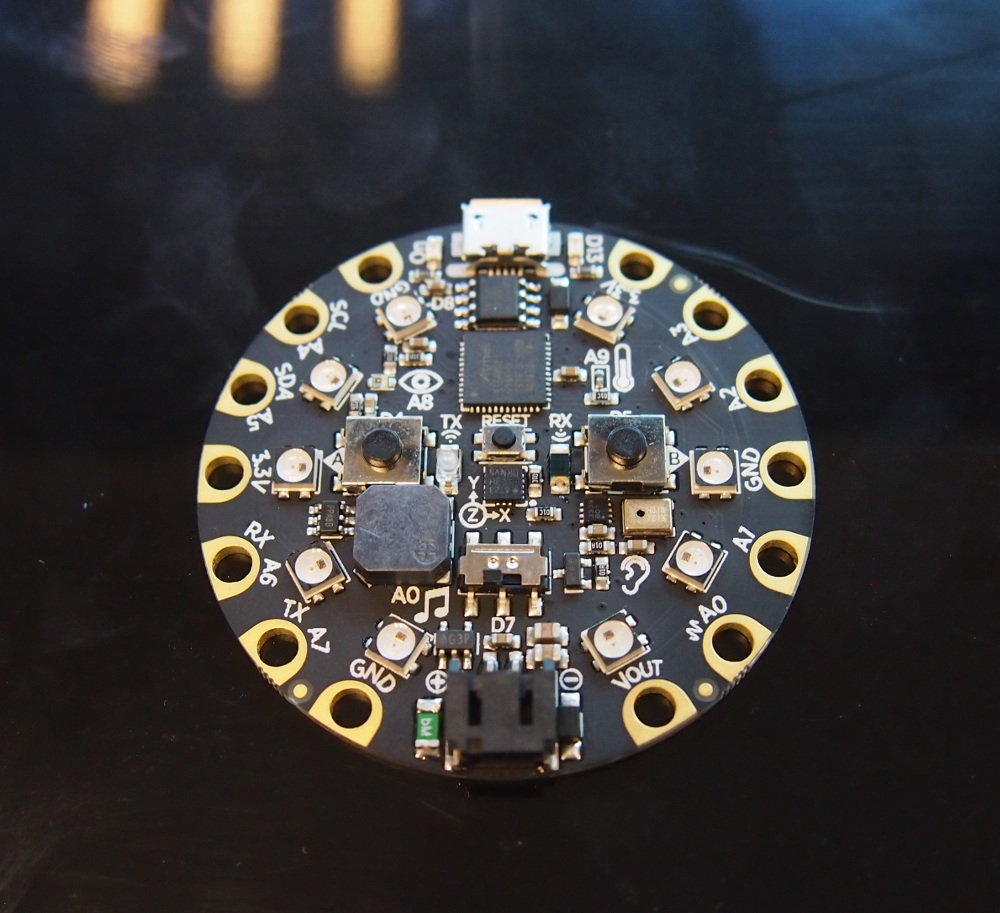 |
| OLLIE SPERO
Ollie is an electrically propelled computer with onboard intelligence giving real-time feedback on tricks, rolls at speeds of up to 14 mph. Connects instantly to device with a range of up to 100 feet. With removable tires and hubcaps to customize look and driving experience. |   |
| ARDUINO
Open Source Mikrocontrollerplatform, understøttet af mange forskellige programmeringsmiljøer. | 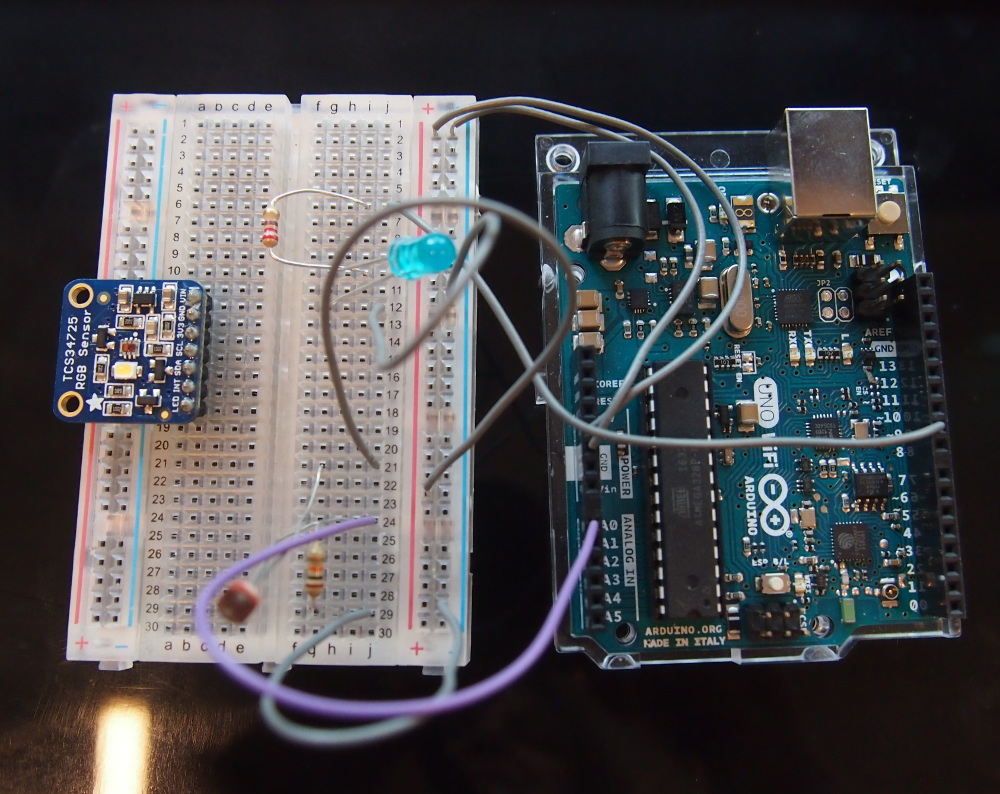 |